
一、创新型赛道
1. 赛道一 智能抓取应用
环境感知与自主抓取是当前机器人领域的热点研究问题,无论是在工业生产、日常生活,还是在科研探索等领域都有着不可忽视的作用。本赛题考核机器人将打乱放置在收纳箱中的物体逐个抓取,并移动至指定区域的能力。比赛推荐采用埃斯顿S3-60协作机器人,按照现场裁判操作要求依次进行指定物体的抓取,在规定的时间内获取尽可能高的分数。
待抓取物体类型丰富多样,包含透明物体(如玻璃杯)、柔性物体(如衣服、手套等)、大重量物体(如扳手、饮料等)、细小物体(如钉子、骰子等)。此外,为增加比赛的挑战性,裁判将在比赛开始前加入四个随机物体,进一步提高抓取的随机性。参赛队伍要在最短的时间内完成任务,在抓取不同类型、不同重量、不同材质物体的过程中,以及面对临时加入的随机物体时,机器人需要稳定地完成抓取任务,避免出现掉落、损坏物体等情况,确保整个操作过程的可靠性。机器人平台示意如图1:

2、赛道二、具身智能应用:
双臂人形机器人凭借拟人化的灵活操作与协同作业能力,在日常生活服务、智能制造、物流仓储、精密装配等场景中展现出重要应用价值。它能够高效完成双手协作类复杂任务,提升生产柔性与作业精度,在降低人工劳动强度、保障高危场景作业安全、推动产业智能化升级等方面具有显著意义,是未来人机共融、自动化替代与柔性生产的重要载体。
本赛项以双臂机器人协作完成复杂任务作为比赛背景,考查机器人在环境感知、自主决策、协作控制等方面的性能。比赛推荐埃斯顿双臂机器人C05-U,按照现场裁判操作要求依次进行规定的任务,自主识别并做出反应以减少不必要的失误和时间消耗,在规定的时间内获取尽可能高的分数。机器人平台示意如图2:

3、赛道三 趣味挑战应用
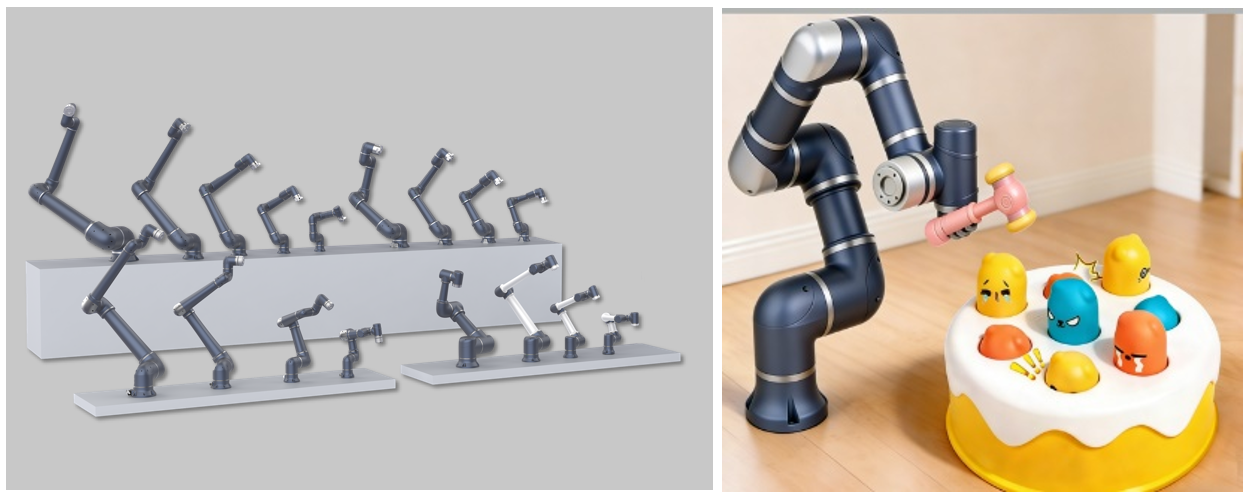
工业领域的机器人具有高速高精度的运动特性,但面对灵活多变的任务却是捉襟见肘。为进一步提高机器人的感知、决策能力,本次趣味挑战赛以埃斯顿协作机器人为核心执行载体,融合视觉识别、运动控制、逻辑指令解析、人机交互等技术,完成机器人打地鼠的趣味任务,考验参赛队伍的机器人运动规划、视觉标定、指令识别与执行、多任务协同能力。
在任务执行过程中,协作机器人需依托视觉识别技术完成地鼠点位的实时捕捉、精准定位与动态追踪,快速区分目标点位与干扰项,保障识别精度与响应速度;依托运动控制技术实现机械臂的灵活调度、平稳运转与精准击打,规避运动卡顿、点位偏移等问题,优化运动路径提升执行效率;同时搭配流畅的人机交互模块,实现人工干预、指令修正、状态反馈等环节的无缝对接,保障机器人运行全程可控。机器人平台示意如图3 :
二、应用型赛道
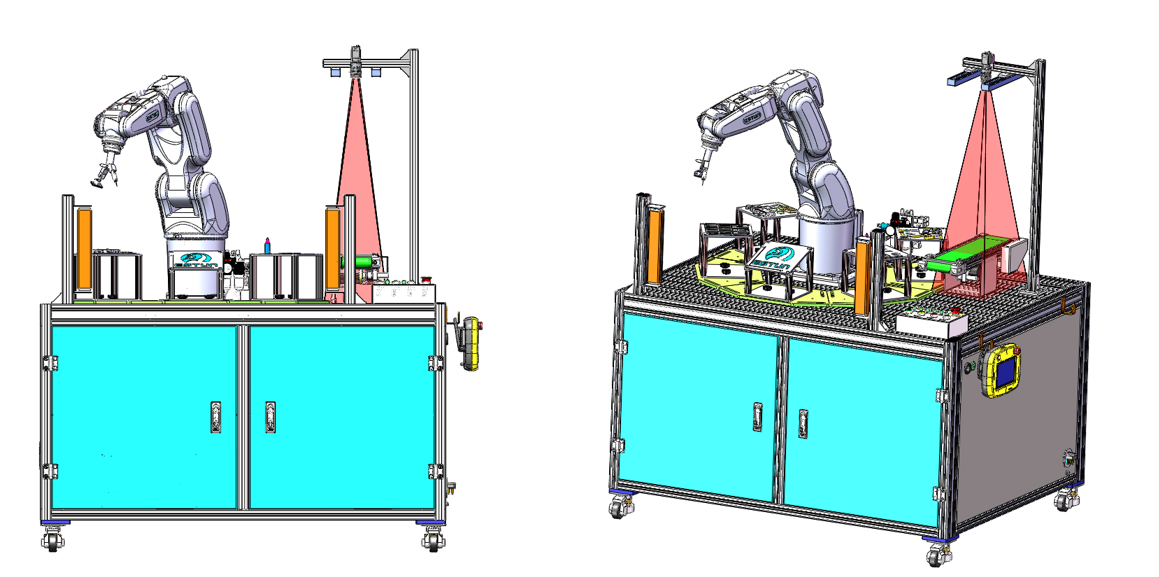
机器人与传感技术、AI技术的不断融合,使其具备了感知能力和决策能力,让机器人变的更智能,这也无限拓展了工业机器人的应用场景。在各类实际生产中,装配、搬运上下料、码垛是几种常见的应用场景,工业机器人同外部视觉系统相配合,正逐步代替人工完成相应工作。
本赛项在“埃斯顿通用机器人实训工作台”上开展,紧密贴合智能制造现场装配、物料搬运上下料、自动化码垛等典型工业生产场景,完成机器人现场编程、点位调试、视觉分拣、流水线作业、工序装配、物料码垛等实操内容,精准优化运动轨迹、减少作业误差与流程耗时,在规定时间内高质量完成全部实操任务。设备平台如图4。
更多竞赛细节咨询组委会老师。